Vectors Joining Two Points
A quantity that has magnitude but no direction is called a scalar quantity. A quantity that has magnitude as well as a direction is called a vector quantity. In mathematics, physics, and engineering, we frequently come across both types of quantities. In real life, we use vectors for tracking objects that are in motion, and localization of places and things.
This Story also Contains
- What is Vector?
- Representation of a Vector
- Components of Vector
- Triangular Law of addition
- Vector Joining Two Points
- Solved Examples Based on Vectors Joining Two Points
In this article, we will cover the concept of Vectors Joining Two Points. This topic falls under the broader category of Vector Algebra, which is a crucial chapter in Class 11 Mathematics. This is very important not only for board exams but also for competitive exams, which even include the Joint Entrance Examination Main and other entrance exams: SRM Joint Engineering Entrance, BITSAT, WBJEE, and BCECE. A total of seven questions have been asked on this topic in JEE Main from 2013 to 2023 including one in 2021.
What is Vector?
A quantity that has magnitude as well as a direction in space and follows the triangle law of addition is called a vector quantity, e.g., velocity, force, displacement, etc.
We denote vectors by boldface letters, such as a or $\vec{a}$.
Representation of a Vector
A vector is represented by a directed line segment (an arrow). The endpoints of the segment are called the initial point and the terminal point of the vector. An arrow from the initial point to the terminal point indicates the direction of the vector.

The length of the line segment represents its magnitude. In the above figure, ${a}=\mathrm{AB}$, and the magnitude (or modulus) of vector a is denoted as $|\vec{a}|=|\overrightarrow{A B}|=A B$ (Distance between the Initial and terminal point).
The arrow indicates the direction of the vector.
Components of Vector
Let the points $A(1,0,0), B(0,1,0)$ and $C(0,0,1)$ on the $x$-axis, $y$-axis and $z$-axis, respectively. Then, clearly,$\overrightarrow{\mathrm{OA}}|=1,| \overrightarrow{\mathrm{OB}} \mid=1$ and $|\overrightarrow{\mathrm{OC}}|=1$

The vectors, $\overrightarrow{O A}, \overrightarrow{O B}$ and $\overrightarrow{O C}$ each having magnitude 1, are called unit vectors along the axes $O X, O Y$, and $O Z$, respectively, and denoted by $\hat{\mathbf{i}}, \hat{\mathbf{j}}$ and $\hat{\mathbf{k}}$ respectively.
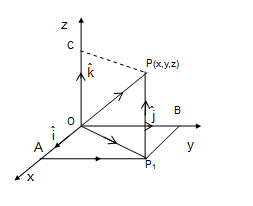
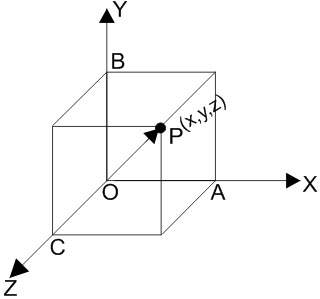
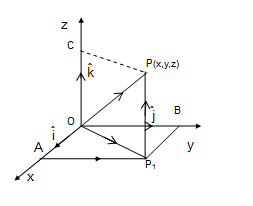
Now consider any point $P(x, y, z)$ with position vector $O P$. Let $P_1$ be the foot of the perpendicular from $P$ on the plane $X O Y$. As we observe $P_1 P$ is parallel to the $z$-axis. Also, $\hat{\mathbf{i}}, \hat{\mathbf{j}}$, and $\hat{\mathbf{k}}$ are the unit vectors along the $x, y$, and $z$-axes, respectively, thus, by the definition of the coordinates of $P$, we have $\overrightarrow{\mathrm{P}_1 \mathrm{P}}=\overrightarrow{\mathrm{OR}}=z \hat{\mathbf{k}}$
Similarly, $\overrightarrow{\mathrm{QP}_1}=\overrightarrow{\mathrm{OS}}=y \hat{\mathbf{j}}$ and $\overrightarrow{\mathrm{OQ}}=x \hat{\mathbf{i}}$

Therefore,
and,
$
\begin{aligned}
& \overrightarrow{\mathrm{OP}_1}=\overrightarrow{\mathrm{OQ}}+\overrightarrow{\mathrm{QP}_1}=x \hat{i}+y \hat{j} \\
& \overrightarrow{\mathrm{OP}}=\overrightarrow{\mathrm{OP}_1}+\overrightarrow{\mathrm{P}_1 \mathrm{P}}=x \hat{i}+y \hat{j}+z \hat{k}
\end{aligned}
$
Hence, the position vector of P with reference to O is given by
$
\overrightarrow{\mathrm{OP}}(\text { or } \vec{r})=x \hat{i}+y \hat{j}+z \hat{k}
$
And, the length of any vector $\vec{r}=x \hat{i}+y \hat{j}+z \hat{k}$ is given by
$
|\vec{r}|=|x \hat{i}+y \hat{j}+z \hat{k}|=\sqrt{x^2+y^2+z^2}
$
Triangular Law of addition
$A$ vector $A B$ simply means the displacement from point $A$ to point $B$. Now consider a situation where a boy moves from $A$ to $B$ and then from $B$ to $C$. The net displacement made by the boy from point $A$ to point $C$ is given by vector $A C$
This is known as the triangle law of vector addition. In general, if we have two vectors a and b, then to add them, they are positioned such that the initial point of one coincides with the terminal point of the other.
When the sides of the triangle are taken in order, it leads to zero resultant as the initial and terminal points get coincide.
Vector Joining Two Points

If $\mathrm{A}\left(\mathrm{x}_1, \mathrm{y}_1, \mathrm{z}_1\right)$ and $\mathrm{B}\left(\mathrm{x}_2, \mathrm{y}_2, \mathrm{z}_2\right)$ are any two points in three - dimensional system, then vector joining point A and B is the vector $\overrightarrow{A B}$.
Joining the point A and B with the origin, O , we get the position vector of points A and B . i.e.
$
\begin{aligned}
& \overrightarrow{O A}=x_1 \hat{i}+y_1 \hat{j}+z_1 \hat{k} \\
& \overrightarrow{O B}=x_2 \hat{i}+y_2 \hat{j}+z_2 \hat{k}
\end{aligned}
$
Applying the triangle law of addition on the triangle $O A B$
$
\overrightarrow{O A}+\overrightarrow{A B}=\overrightarrow{O B}
$
Using the properties of vector addition, the above equation becomes
$
\overrightarrow{A B}=\overrightarrow{O B}-\overrightarrow{O A}
$
i.e.
$
\begin{aligned}
\overrightarrow{A B} & =\left(x_2 \hat{i}+y_2 \hat{j}+z_2 \hat{k}\right)-\left(x_1 \hat{i}+y_1 \hat{j}+z_1 \hat{k}\right) \\
& =\left(x_2-x_1\right) \hat{i}+\left(y_2-y_1\right) \hat{j}+\left(z_2-z_1\right) \hat{k}
\end{aligned}
$
The magnitude of vector $\overrightarrow{A B}$ is given by
$
|\overrightarrow{A B}|=\sqrt{\left(\mathrm{x}_2-\mathrm{x}_1\right)^2+\left(\mathrm{y}_2-\mathrm{y}_1\right)^2+\left(\mathrm{z}_2-\mathrm{z}_1\right)^2}
$
Recommended Video Based on Vectors Joining Two Points
Solved Examples Based on Vectors Joining Two Points
Example 1: Let a vector $\alpha \hat{i}+\beta \hat{j}$ be obtained by rotating the vector $\sqrt{3} \hat{i}+\hat{i}$ by an angle of 45o about the origin in the counterclockwise direction in the first quadrant. Then the area of a triangle having vertices $(\alpha, \beta),(0, \beta)$ and $(0,0)$ is equal to :
Solution

$
\begin{aligned}
& \text { Area of } \Delta\left(\mathrm{OA}^{\prime} \mathrm{B}\right)=\frac{1}{2} \mathrm{OA}^{\prime} \cos 15^{\circ} \times \mathrm{OA}^{\prime} \sin 15^{\circ} \\
& =\frac{1}{2}\left(\mathrm{OA}^{\prime}\right)^2 \frac{\sin 30^{\circ}}{2} \\
& =(3+1) \times \frac{1}{8}=\frac{1}{2}
\end{aligned}
$
Hence, the answer is 1/2
Example 2: A point has a position vector $\overrightarrow{7}-2 \hat{i}-3 \hat{j}+5 \hat{k}$ then the sum of its co-ordinates equals
Solution: Position vector of a point - $\overrightarrow{O P}=\hat{x i}+y \hat{j}+z \hat{k}$
$\hat{\gamma}=2 \hat{i}-\hat{j}+5 \hat{k}$, so x-coordinate is 2
$y$-co-ordinate is $-3 \& z$-co-ordinate is 5 .
Sum of co-ordinates $=2+(-3)+5=4$
Hence, the answer is 4
Example 3: If and $\vec{b}$ are two non-collinear vectors then, the number of unit vectors orthogonal to both $\vec{a}$ and $\vec{b}$ is
Solution: Orthogonal system of Unit Vectors $-\overrightarrow{O P}=x \hat{i}+y \hat{j}+z \hat{k}$
$\vec{a}$ and $\vec{b}$ are non-collinear, so they will lie in a plane (particular), so the orthogonal vector to them will be orthogonal on the plane as well, so it can be in two directions just opposite to each and perpendicular to the plane. Hence two unit vectors.
Hence, the answer is 2
Example 4: The sum of the length of projections of $\vec{a}=-2 \hat{i}-3 \hat{j}+7 \hat{k}$ on co-ordinate axes is
Solution: Length of projection on $x$-axis $=|-2|=2$
Length of projection on $y$-axis $=|-3|=3$
Length of projection on z-axis $=|7|=7$
$\therefore$ The sum of the length of projections $=2+3+7=12$
Hence, the answer is 12
Example 5: What is a unit vector along coordinate axes?
Solution: Regular Cartesian System - In a three-dimensional coordinate system, unit vectors in the direction of the positive x, y, and z axis are $\hat{i}, \hat{j}$ and $\hat{k}$ respectively.
$\because \hat{i}, \hat{j}, \hat{k}$ are unit vectors along coordinate axes, so $\because-\hat{i},-\hat{j},-\hat{k}$
will also be unit vectors along coordinate axes but in the direction of negative $x, y \& z$-axis respectively.